
¿Cuáles son los componentes del dispositivo térmico?
Los dispositivos térmicos, ya sea monoculares, Clip-On (monoculares acoplables) o miras térmicas, son aparatos de extrema complejidad, es por ello que los convierten en el mejor compañero en situaciones de detección, reconocimiento e identificación de objetos con calor en contextos nocturnos y diurnos. Poseen un gran número de componentes, la variación de los mismos hace que se modifique la calidad de la imagen, su alcance y principalmente su precio.
Dichos componentes son: tipo y resolución del sensor térmico, paso de pixel del sensor térmico, NETD (Noise Equivalent Temperature Difference – diferencia de temperatura equivalente a ruido) del sensor térmico, diámetro de lente, tipo de pantalla, funciones (telemetría, filmación y fotografía), unidad de procesamiento electrónico, duración de la batería, zoom digital, resistencia al choque (retroceso del arma), peso y dimensiones, distancia focal, tamaño de la pantalla, entre otros.
¿Qué componentes analizar para saber que térmico es mejor?
La mayoría de los usuarios no son expertos en tecnología térmica, es por eso que este artículo pretende poder diferenciar cuál térmico es mejor según las necesidades del usuario, con un pequeño análisis de los componentes más influyentes.
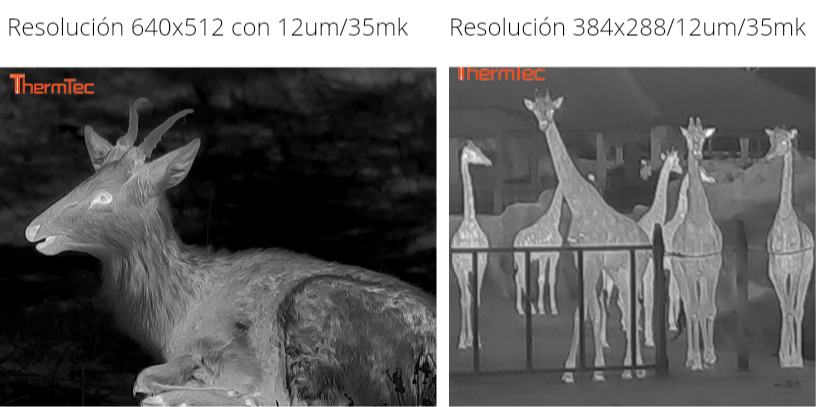
1) Resolución:
La resolución se indica como el número total de pixeles (384×288, un total de 110.592 pixeles). Mientras más alto sea este valor, mayor será la calidad de la imagen.
2) Paso de pixel:
El paso de pixel es la distancia entre los centros de dos pixeles del sensor térmico y se mide en micras (µm). Mientras más bajo sea este valor (12 µm respecto a 17 µm) más pixeles entrarán en una misma área. Por ende, la imagen será más nítida y el térmico será capaz de detectar, reconocer e identificar objetos a mayores distancias, comparado con un mismo diámetro de lente.
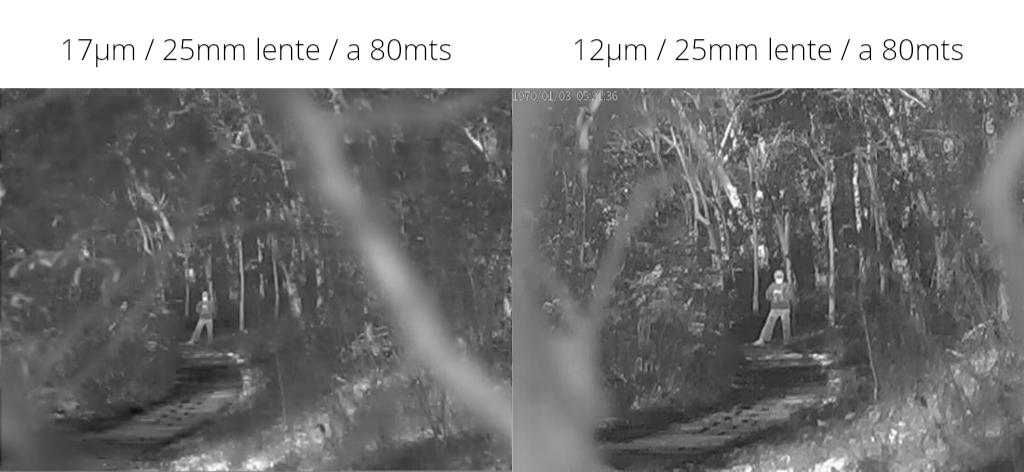

Como se puede observar, el alcance de un dispositivo térmico depende del diámetro del lente y del paso de pixel. Un monocular puede tener 50mm de lente pero 17um de paso de pixel y tener menos alcance que otro con lente de 35mm pero paso de pixel de 12um. Y agregando que este último, tendrá una mejor calidad de imagen.
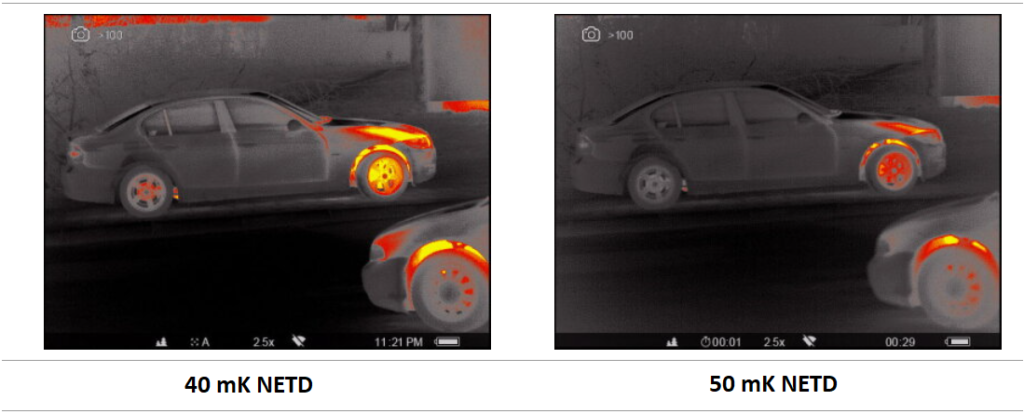
3) NETD:
Este parámetro se mide en milikelvin (mK) y podría resumirse como la sensibilidad térmica. En su traducción, “diferencia de temperatura equivalente a ruido”, la palabra ruido hace referencia al contexto, a lo que no queremos detectar. Esto significa que cuando la temperatura de un objeto desciende lo suficiente, la señal de calor que irradia puede mezclarse con la del contexto, hasta el punto que el sensor térmico no puede distinguir la señal del objeto con calor del contexto; esta situación se daría más comúnmente en verano.
Cuanto más bajo es el valor NETD, mejor podrá el sensor registrar pequeñas diferencias de temperatura, es decir que un sensor con un NETD alto, que sólo distingue las diferentes temperaturas cuando estas diferencias son altas, no distinguirá la diferencia de temperatura entre las partes del cuerpo del animal; mientras que un NETD bajo, que distingue diferentes temperaturas, aunque sus diferencias sean pequeñas, indicará cuáles son las partes del animal que poseen más calor.
A una escala mayor y como un ejemplo irreal, para un NETD alto (<60mK) 28°C y 29°C será lo mismo, mientras que para un NETD bajo (<35mK) diferenciará las dos temperaturas con atenuaciones de colores diferentes en la pantalla.
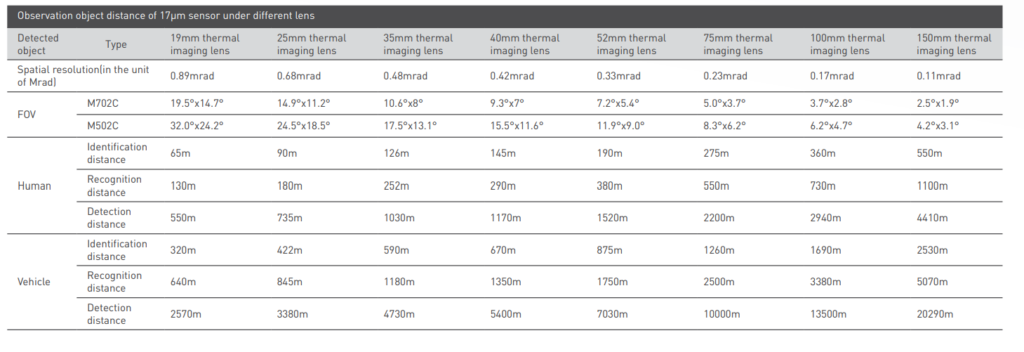
4) Diámetro del lente:
El rango máximo de detección depende de varios factores: ante los mismos componentes y, sobre todo, mismo paso de pixel, mientras mayor sea el diámetro del lente, mayor alcance de detección, reconocimiento e identificación tendrá el dispositivo térmico.
En cuanto a los tipos de rangos podemos discernir:
Rango de detección: La detección significa que el objeto es visible a cierta distancia, pero no se puede determinar el tipo de objeto.
Rango de reconocimiento: El reconocimiento de un objeto significa que se puede definir el tipo de objeto, el observador puede discernir lo que está siendo observado, es decir si es un ser humano, un animal, un automóvil, etc.
Rango de identificación: La identificación significa que el observador puede evaluar no sólo el tipo de objeto, si no también sus rasgos característicos (macho de jabalí, qué persona es, etc.)
5) Funciones:
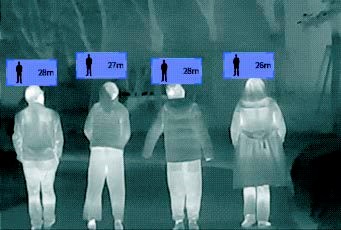
Telémetro inteligente.
Utiliza un software similar al estadimétrico, pero de forma automática, posee un rango de alcance de aproximadamente 300 metros; en términos de precisión no es tan preciso como el telémetro láser, sin embargo, en términos prácticos, el telémetro inteligente identifca que objeto es, puede dar varios datos al mismo tiempo y en forma automática.
Telémetro láser.
El aparato envía un rayo láser hasta el objeto, rebota y vuelve al telémetro, el mismo toma el tiempo que el impulso láser tarda en ir y volver. Es un método bastante preciso, pero sólo funciona si no hay ningún objeto entremedio.
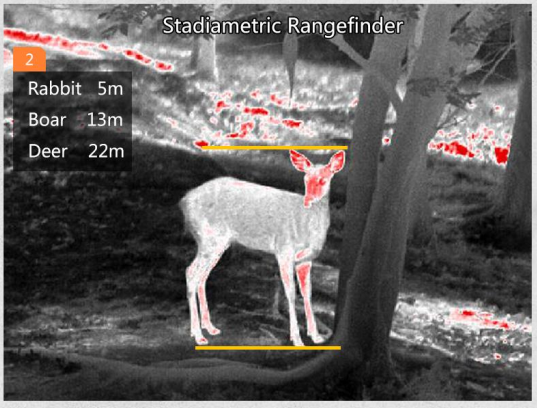
Telémetro estadimétrico.
Permite conocer la distancia sabiendo el tamaño del objeto, los datos del tamaño del objeto están cargados en el software, el usuario simplemente debe colocar una raya debajo y otra arriba del objeto.
Filmación y fotografía.
Una función que podría ser obvia, pero hay marcas y modelos que no la poseen. Los térmicos incluyen Wifi y app móviles que proporcionan un uso más práctico y satisfactorio.
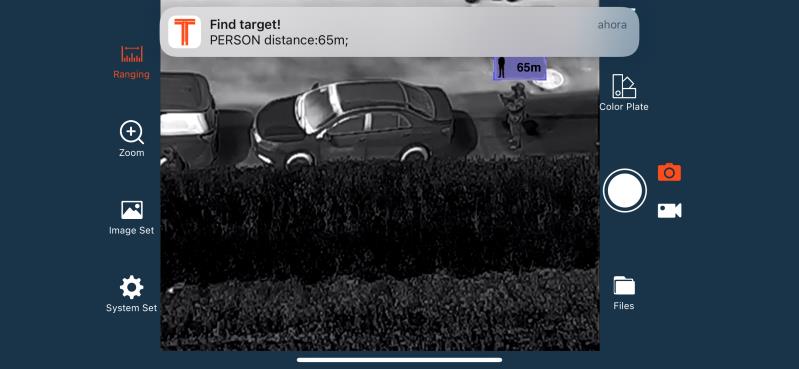
Sensor de movimiento
El visor permite detectar el animal cuando no se está mirando y envía una notificación al reloj o app móvil brindando información sobre el tipo de objeto y distancia a la cual fue encontrada.

A continuación se muestra un esquema que resume la valoración subjetiva de los componentes, para que en términos practico se pueda diferenciar entre un visor o monocular térmico y otro.
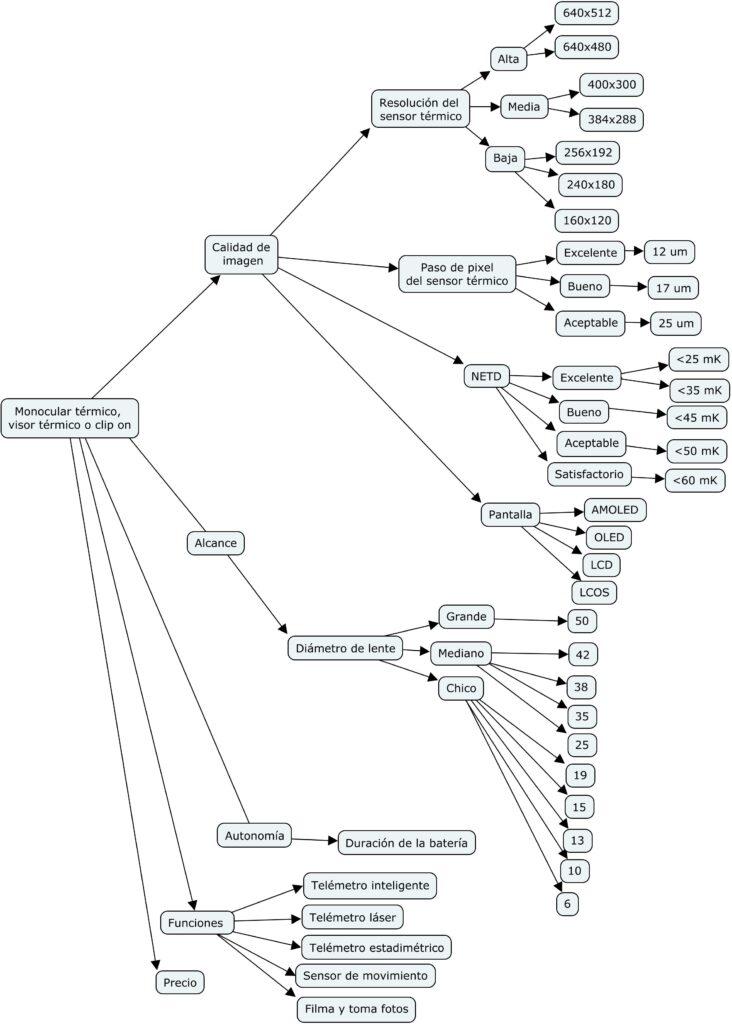
Luego de que se conoce los componentes, se sabe cual es mejor que otro. Se puede realizar un cuadro comparativo, como el que se muestra abajo, para poder comparar rapidamente entre uno y otro.
